Download Project Document/Synopsis


Stepper motors are quite different from DC motors since they have the ability to break down a full rotation to small steps. It allows user to control the rotation angle of motor with precision. Dc motors rotate when we apply terminal voltage. Stepper motors are built with electromagnets with each having a different alignment. When a particular electromagnet is powered the gear teeth are aligned as per that particular electromagnet. When the next electromagnet is powered the gear teeth get aligned to that particular electromagnet. This allows for slight controlled rotation as per the electromagnets charged. Thus we get angular motion of the gear as and when needed. Now this movement can be controlled using a microcontroller and the input to microcontroller can be provided remotely.


- Hardware Specifications
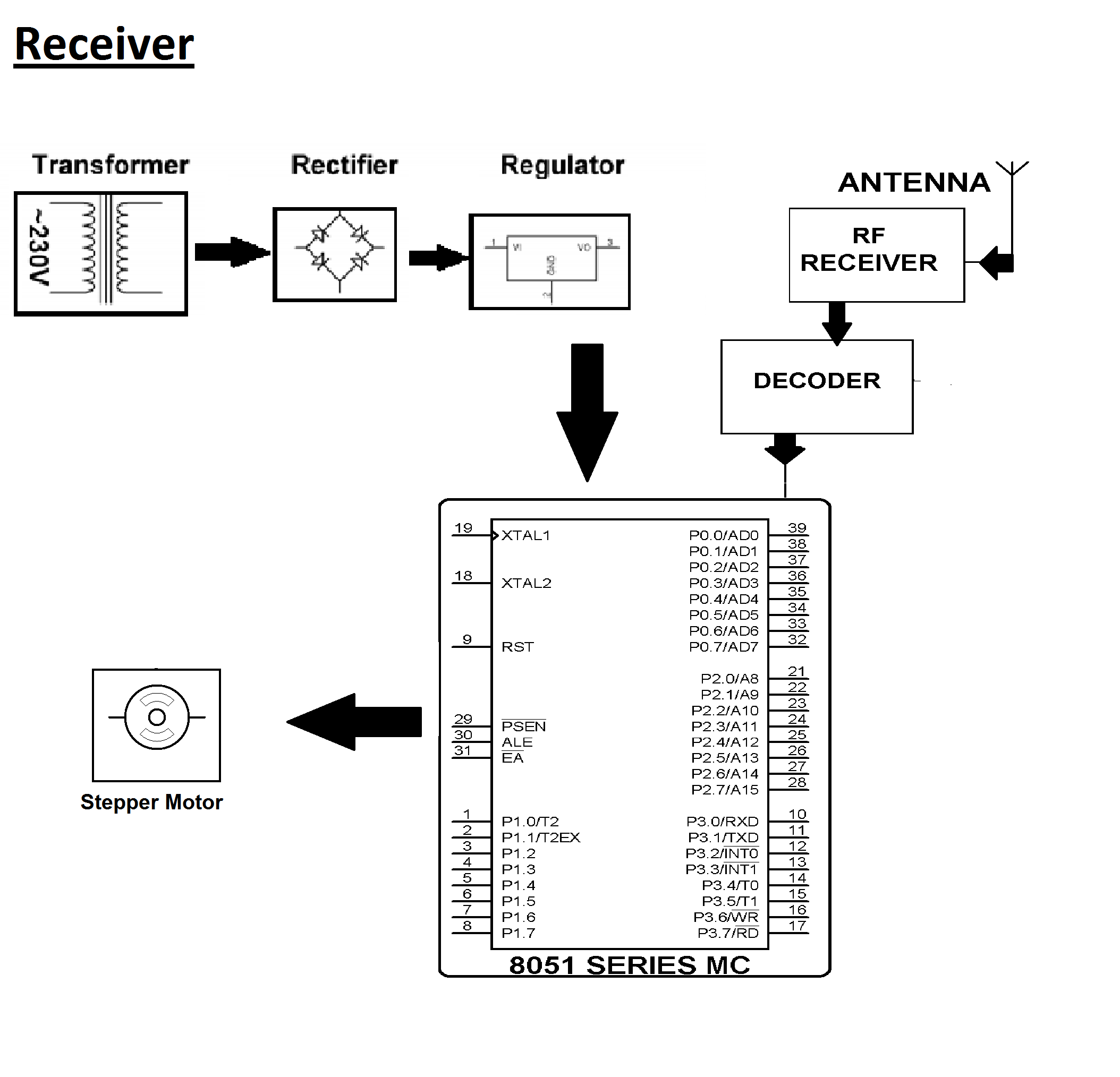
- 8051 Microcontroller
- RF Tx Rx
- Crystal Oscillator
- Resistors
- Capacitors
- Transistors
- Cables and Connectors
- Diodes
- PCB and Breadboards
- LED
- Transformer/Adapter
- Push Buttons
- Switch
- IC
- IC Sockets
- Software Specifications
- Keil µVision IDE
- MC Programming Language: C
Block Diagram
![]()